
REVIEW DCS MI-24P
Un peu d’histoire !
Pas moins de 50 000 heures et environ 3 ans de développement (et c’est pas finit !!) furent nécessaires pour nous pondre celui qui est encore à ce jour l’icône star des hélicoptères de Russie, le MI-24P nom de code OTAN: HIND-F
Le HIND est un hélicoptère d’attaque soviétique dont le développement débuta dans les années 70. Reconnaissable par son cockpit en tandem à « double bulle » il est aussi l’un des rares appareils d’attaque à avoir une capacité de transport de troupes (8 soldats).
C’est en 1975 que Mil (le constructeur) décida de développer une version plus lourdement armée et dérivée du Mi-24V. Globalement l’appareil est similaire en tout point au Mi-24V à la différence près que la mitrailleuse YakB-12,7 de 12,7mm fait place à un canon-double à tir rapide GSh-30K de 30mm déjà introduit sur le Su-25. Cette arme, approvisionnée à 250 coups, est localisée sur côté droit du fuselage. Elle est tellement puissante qu’il fut impossible pour les ingénieurs de la monter en tourelle sous le nez du Hind.
L’avionique du Mi-24P repose sur un radar de navigation doppler DISS-15G (situé sous le rotor de queue), un altimètre RV-5 et un IFF SRO-1P Parol (OTAN : Slap Shot). Il est par ailleurs équipé des radios R-860 et Karat-M24. Il est à noter que son système de contrôle de vol SAU-V24-1 est mécanique et qu’il dispose d’un pilote automatique VUAP-1.
Outre son canon à la puissance de feu redoutable, le Mi-24P est équipé du système de missile antichar 9K113 Shturm-V guidé par le système de guidage semi-automatique Raduga-Sh. Il est pourvu de deux pylônes d’emport d’armements sur chaque aile tandis qu’un point supplémentaire aux extrémités est réservé aux missiles antichars. Ainsi, jusqu’à 8 missiles 9M114 (OTAN : AT-6 Spiral) peuvent être embarqués.
Enfin, l’appareil est capable d’emporter toute une gamme d’armes non-guidées sous ses quatre pylônes d’aile : le nouveau pod lance-roquettes B8V-20A et ses roquettes S-8 de 80mm (ou bien le plus classique UB-32 porteur de 32 S-5 de 57mm), la roquette S-24 de 240mm, le pod canon UPK-23-250, les bombes FAB-100/250/500, le conteneur à sous-munitions KMGU-2 ou bien la bombe au napalm ZB-500.
Pour son autoprotection, le Mi-24P est équipé du détecteur d’alerte radar SPO-15LM Beryoza (L-006LM), du brouilleur infrarouge L-166V1 Ispanka (OTAN : Hot Brick) et du lance-leurres ASO-2V. De plus, un blindage spécifique de 300kg est appliqué aux zones critiques comme le cockpit, la baie des turbines etc.
source: https://aviationsmilitaires.net/v3/kb/aircraft/show/13573/mil-mi-24p-otan-hind-f
1. La modélisation
La modélisation 3D
La modélisation 3D du HIND est de très bonne facture, comme à l’accoutumé pour ED. Qu’ils s’agissent du train d’atterrissage, du mat, de la tête rotor ou bien encore de la soute de transport, tout est parfaitement reproduit.
L’intérieur du cockpit n’est pas en reste lui aussi ! On peut ainsi retrouver un extincteur à l’arrière du pilote, tous types de câblages fixés (à la russe) ici et là ou bien encore de nombreuses traces d’usures prononcées.
Cependant certaines « modélisations » ne sont pas totalement ce qu’elles devraient être ! Par exemple, si on allume le ventilateur et que l’on clique sur celui-ci alors il va s’arrêter, lorsque l’on relâche le clique ce dernier repart. Marrant ? Peut-être utile ? Absolument pas !
A l’opposé, les ailettes de la perche à l’avant du cockpit restent malheureusement fixes alors qu’elles devraient avoir un minimum de mouvement…
Modélisation extérieure









Modélisation Cockpit
Opérateur



Pilote











Le modèle de vol
Le modèle de vol du HIND est proche de ce que l’on pourrait s’attendre pour un hélicoptère de cette envergure. On sent qu’il est lourd et qu’il ne s’agit pas d’un appareil destiné à de longues minutes en vol stationnaire comme la gazelle ou l’apache. C’est un hélicoptère « qu’il est fait pour voler vite » (mais pas trop 😉 ).
Ses points d’emports massifs perturbent l’écoulement de l’air brassé par le rotor lorsqu’il vole à faible vitesse, mais ils lui procurent une portance supplémentaire lorsqu’il vole à haute vitesse. Lorsqu’il est lancé et une fois trimmé on se sent calé comme sur des rails, un pur régal !
Cependant attention, c’est un hélicoptère qui aime la haute vitesse, un peu trop même ! On se retrouve assez rapidement en survitesse (mortelle) ce qui entraine un basculement de l’hélicoptère sur son flanc droit (principe de pale avançante et pale reculante), si ce n’est pas repris à temps vous allez voir que c’est le sol qui va gagner l’affrontement ! Deux règles pour éviter ceci, ne jamais dépasser 350km/h sol et si jamais le basculement est en train de s’engager alors il faut simplement réduire le collectif !
Mais lorsqu’il s’agit de virer, c’est une toute autre histoire.
Ne vous attendez pas à faire des virages très serrés comme avec d’autres machines, il est lourd, très lourd et son autorité (efficacité) au palonnier est relativement limitée en fonction de son poids. Pour effectuer un virage propre, il suffit de l’engager, de mettre un peu de pied, de tirer le manche pour éviter que le nez s’affaisse et le laisser « faire sa vie ». Si l’on cherche à l’inscrire dans un virage trop serré le MI-24P va vous faire comprendre son « mécontentement aérodynamique », ses points d’emports vont faire office d’aérofreins géants, il va se cabrer, le nez va chercher le ciel et les génératrices ne vont pas apprécier !
Si vous vous amusez à voler à grande vitesse et à vouloir freiner l’hélicoptère rapidement en tirant sur le manche, vous allez ni plus ni moins effectuer « un cobra ». Attention cependant la poutre de queue n’est pas aussi joueuse et à une fâcheuse tendance à se briser lors de cette manœuvre.
Au sol, le roulage est assez… sportif, de par l’orientation de son rotor vers l’avant, le HIND avance seul vers la droite lorsque l’on lâche les freins. Il faut tirer ou trimmer le manche en arrière pour éviter de prendre trop de vitesse. Si l’on met un peu trop de gaz, il a une tendance à partir sur l’avant et à basculer sur la gauche, attention aux bouts de pales !!
Lorsque l’on tente un décollage vertical pleine charge, il faut mettre beaucoup de collectif, tellement qu’il arrive que même avec le pied à fond à droite le rotor anti-couple (RAC) n’arrive pas à suivre. Pas de panique, il suffit de réduire un peu le collectif pour rendre de l’autorité au RAC. Il est préférable de respecter les limitations de poids et de privilégié un décollage roulé.
Le décollage roulé n’est pas de tout repos, comme pour le roulage la machine à une tendance à partir sur l’avant gauche, il faudra donc trimmer correctement pour espérer faire un décollage propre et aligné !
-

- Trop de gaz et pas de main sur le manche
-

- Décollage roulé
2. Le tour du cockpit
En place arrière (pilote)
Place la plus importante dans le HIND (et oui sinon on ne peut le démarrer) c’est aussi celle qui comporte la plus grosse charge de travail, en témoigne le nombre de boutons, interrupteur et potentiomètres qui y pullulent.
Mise en route, pilotage, navigation, armement, gestion du carburant, etc… Autant dire que le rôle de pilote n’est pas de tout repos ! Cependant, la vue offerte par sa large bulle (du côté gauche de préférence) en vaut la peine !
Bien qu’il y ait pléthore d’interrupteurs, la majorité ne sont qu’à actionner une fois ou deux au démarrage, au final relativement peu sont utilisés durant les phases de vol !
-

- elle est pas belle la vue ?
-

- celui qui à inventer ce levier général est un génie
En place avant (opérateur)
La place opérateur permet le pilotage de la machine grâce à un système de cyclique débrayable et de palonnier rétractable, elle permet aussi de gérer une partie des équipements de radionavigation et bien sûr de gérer l’armement et la « délivrance de ce dernier ».
« La place la plus importante dans le HIND est celle du pilote ? »
C’est exact si vous faites du vol de tourisme, pour partir au combat, il vous faudra obligatoirement un opérateur pour une bonne raison : lui a accès au « Master Arm » !
Une autre bonne raison (s’il vous en fallait une) d’avoir un opérateur est d’avoir une paire d’yeux en plus pour rechercher (lorsque celle si sera implémentée), acquérir des cibles et tirer des missiles via le système 9K113 (autrement appeler le périscope).
-

- sans les commandes
-

- avec les commandes
-

- le systemes 9K113
-

- il ne faut pas être claustro
-

- Le master arm
3. Petrovitch, un « Camarade » IA qui vous veut du bien.
L’interface avec l’IA
Pour pouvoir voler avec Petrovitch (notre coéquipier synthétique) « ED a choisi un interfaçage simple via l’utilisation de boutons et via un HAT à 4 positions (que nous conseillons). L’avantage de cette solution est le double emploi du Hat, lorsque l’indicateur « Lambda » est affiché le Hat contrôle Petrovitch, lorsque l’indicateur est caché le Hat contrôle un autre système.
Une touche permet l’apparition de l’indicateur de « visée » lorsque Petrovitch est opérateur et d’une rosace avec différentes informations lorsqu’il est pilote.
Une fois ces interfaces affichées, on peut donner des ordres à Petrovitch via le HAT 4 positions. C’est assez instinctif et simple d’utilisation comparé à ce qui se fait déjà in-game (coucou JESTER).
Petrovitch « Opérateur »
En tant qu’opérateur Petrovitch se contente de la gestion des ATGM et la recherche de cible.
Une commande permet de demander à Petrovitch de passer le master arm sur ON.
Une autre lui demande de sélectionner la cible avec l’asp-17 (le HUD du pilote).
L’appui sur la commande d’indicateur fait apparaître une croix à trois branches regroupant 4 informations importantes :
- Le cap ou l’on regarde
- l’azimut gauche/droite (L/R) par rapport à l’axe de l’appareil
- l’élévation par rapport à l’appareil
- le code couleur qui indique l’état d’armement de Petrovitch
Cette croix permet de désigner la zone où l’on souhaite que Petrovitch oriente son système de visée optique.
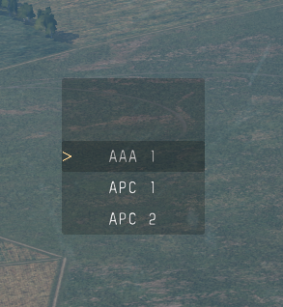
Lorsque Petrovitch a des cibles en visuel sur la zone qui lui est assignée, un menu apparait avec la possibilité de faire un choix sur la cible prioritaire. Ce choix est encore possible même lorsque le menu disparaît via les commandes haut/bas du Hat.
Une interface apparait également avec un appui gauche court sur le HAT pour régler le largage des leurres.
Pour ce qu’il s’agit du combat, Petrovitch est une bonne IA, cantonné au rôle de tireur de missile, il fait ça bien et de manière quasi-humaine. En effet, la réussite de son tir dépendra grandement de votre stabilité, son périscope n’étant pas gyro-stabilisé le moindre écart de votre part implique pour lui une correction à effectuer le plus rapidement possible.
-

- Hold fire, ATGM not ready
-

- Free fire, ATGM not ready
-

- Hold fire, ATGM ready
-

- Free fire, ATGM ready
-
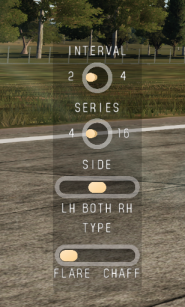
- panneau de gestion des contres-mesures
Petrovitch « Pilote »
Petrovitch en tant que pilote est pour l’instant moins bien réussi que sa version opérateur.
Ceci est surement dû au fait qu’il s’agit encore d’une « version Early » et que la majorité des joueurs vont sûrement vouloir prendre le rôle de pilote (faut bien trouver une excuse à ED 😉 ).
L’IA « Pilote » est découpée en 4 principaux modes de fonctionnement.
Vol stationnaire (HVR):
Lorsqu’il est en vol stationnaire Petrovitch maintient bien l’appareil en place, tellement bien qu’on dirait qu’il est au sol ! Le passage en mode Hover se fait par le mode flight lorsque l’on ramène la vitesse à 0.
Vol stationnaire de translation (HVRT):
Le mode HVRT se fait via le mode HVR. L’appui prolongé sur le HAT fait translater l’appareil du coté choisi (avant/arrière / gauche/droite)
Vol croisière (FLT):
Lorsqu’il est en vol de croisière, 7 choix de vitesse sont possibles (en km/h) : 0/60/120/150/200/250 et MAX.
Le passage à la vitesse supérieure se fait bien, mais par contre la décélération provoque une action à cabrer violente pour diminuer la vitesse.
Pour l’altitude c’est au choix, de 0 à 699 mètres en « RADAR » (radiosonde) et passe automatiquement en barométrique au-delà.
Cependant, il est vivement conseillé de garder un œil à l’extérieur dans un environnement montagneux, Petrovitch n’anticipe pas le relief devant l’appareil et ne cherche donc pas à éviter un obstacle surgissant brusquement (paf dans la montagne !).
Vol combat (CBTM):
Dans ce mode les commandes permettent de demander à Petrovitch de s’aligner pour une passe ATGM, de s’aligner sur la cible dans le périscope ou bien encore d’effectuer un 180° d’évasive.
Changements de cap:
Tous les modes à l’exception du mode combat permettent de changer de cap.
Deux façons de procéder :
- Avec le Hat appui long gauche/droite pour déplacer le HDG sur le cap voulu.
- Avec un Hat droit court qui fait apparaît un « lambda », on regarde vers le cap voulu, on refait un Hat droit court et Petrovitch nous dirige sur ce cap.
De façon générale, Petrovitch en tant que pilote n’apporte rien de plus qu’une aide limitée. Ses changements de cap, de diminutions de vitesse sont brutaux, il est un bon soldat bête et bien discipliné et il ne va pas réfléchir à éviter un obstacle, pour lui tout droit,c’est tout droit !
-

- Mode Hover « HVR »
-

- Mode translation Hover « HVRT »
-

- Mode combat « CBTM »
-

- Mode vol « FLT »
-

- Le « lambda » de sélection de cap
4. Les systèmes principaux
Communications
Le MI-24P est équipé de 4 radios toutes situées sur la paroi gauche du cockpit pilote. Deux d’entre elles sont paramétrables uniquement via l’éditeur de mission (la R-863 et la R-828).
La R-863 est une radio VHF/UHF sur la plage de fréquence 220 à 399.975 MHz. Elle permet aussi la réception des balises ADF avec l’ARK-U2.
La R-828 est une radio LVHF sur la plage 20 à 59.975 MHz.
La JADRO-1A est une radio HF sur la plage 2 à 17.999 MHz. C’est la seule radio paramétrable à bord. Attention le petit piège avec cette radio est que son affichage est en KHz, il ne faudra pas oublier de déplacer la virgule !
La R-852 limitée à quatre fréquences non paramétrables (114.115 ; 114.335 ; 114.585 ; 121.5). Elle est surtout utilisé pour du contact radiobalise mais semble avoir la possibilité de communiquer avec d’autres MI-24P.
Un sélecteur de radio nous permet de choisir sur laquelle nous allons émettre et recevoir, puis il ne reste plus qu’à presser la détente radio je précise (NDLRC6 l’alternat) pour communiquer. Ça reste un jeu d’enfant !
Seul le pilote peut paramétrer les fréquences radio, mais chaque membre d’équipage possède un sélecteur de radio et peut donc communiquer avec deux sources quasi indépendamment l’une de l’autre.
-

- la JADRO à gauche, la R-863 à gauche et le sélecteur de radio dessous au centre
-

- la R-828 à gauche bien caché dans son coin !
-

- Le selecteur de radio en place opérateur
Navigation
Voler,c’est bien, savoir où l’on va, c’est mieux ! Afin de ne pas se perdre le hind possède quatre systèmes de navigation:
- La carte « mobile » est le système de navigation principale de la machine, elle fonctionne sur l’effet doppler. La croix représente l’appareil, lorsque celui-ci se meut la croix se déplace elle aussi. Attention toutefois, sur de longs déplacements une dérive apparaît. Il faut donc prévoir des waypoints de recalage.
Lorsque des waypoints sont créés via l’éditeur de mission la route apparaît en noire sur la carte. Trois informations sont données sur chaque branche, le cap à prendre, la distance (kilomètres à faire) et le temps prévu. Pour ce dernier le temps est uniquement calculé par rapport à la vitesse indiquée dans l’éditeur de mission.
Pour manipuler la carte différents éléments sont disponibles:- Un sélecteur on/off pour alimenter ou non la carte.
- Un sélecteur pour choisir l’une des deux échelles possibles (à l’heure actuelle, uniquement Caucase et Nevada sont fonctionnelles pour la petite échelle) ce qui permet une meilleure précision dans le recalage.
- Deux molettes, une verticale l’autre horizontale pour déplacer la croix.
- Le DISS, même système à effet doppler que le MI-8, on rentre une distance (pas nécessaire), un cap magnétique, on actionne le système et celui-ci nous indique si il y a une dérive droite ou gauche par rapport au cap choisi.
- l’ARK-15 est similaire à l’ARK-9 du MI-8. On rentre la fréquence d’une balise ADF, on sélectionne « compas » et normalement l’aiguille 1 du HSI prend vie. C’est le seul système de navigation doublé sur les deux postes, avec possibilité de prendre le contrôle. Ce qui amène à quatre le nombre de fréquences programmables simultanément.
- L’ARK-U2 fonctionne aussi en radionavigation, elle est similaire à l’ARK-UD du MI-8. Elle peut fonctionner avec le système R-852 limité à quartes fréquences (114.115 ; 114.335 ; 114.585 ; 121.5) ou bien couplé avec la radio R-828.
-

- La carte sur la plus grande échelle
-

- La même sur la plus petite échelle
-

- Décalage de la croix
-

- Le DRISS
-

- L’ARK-15
-

- L’ARK-U2 en bas a gauche
-

- Le HSI
5. Les systèmes d’armes
Les armements
Le HIND est équipé de base d’un canon GSh-30k bitube de 30mm d’une capacité de 250 coups. En plus de ce canon à la précision redoutable, il est pourvu de 6 points d’emports pouvant accueillir des armements divers et variés. Du panier à roquettes de 80 mm jusqu’à la bombe FAB-500 en passant par les missiles antichar 9K113 Shturm-V.
-

- Le canon bitube
-

- B-13L panier à roquettes de 122mm
-

- bombe FAB-250 et panier à roquette B8V20 de 80mm
-

- Pod GUV-1 ( 12.7mm + 2×7.62mm)
-

- Pod GUV-1 AP30 ( grenade de 30mm)
-

- Panier à roquettes UB-32A de 57mm
-

- Roquettes S-24B de 240mm
-

- Bombes RBK-250 et 500 à sous munitions
-

- Bombes FAB-250 et 500
La place avant
Au niveau de l’armement l’opérateur a pour principale mission l’acquisition et le tir du missile ATGM via le viseur 9K113. Il peut cependant prendre le contrôle sur d’autres armements comme les bombes, les bombes à sous-munitions le canon et les roquettes.
Le tir ATGM
Qu’on se le dise, le tir ATGM avec Petrovitch est assez… Fastidieux ! Ses mouvements sont assez brusques, lors de l’acquisition et de la tentative de maintien de la cible dans le réticule, il lui arrive de faire des mouvements parasites qui nous décalent la cible. Et lorsque le missile est sur le point de toucher, c’est rageant !
Il est clairement préférable de jouer avec un humain avec qui l’on peut plus facilement communiquer (NDLRC6: hurler dessus si il bouge 😉 ).
Concernant la partie gestion de l’ATGM en soit ce n’est pas bien compliqué.
- On allume le système missile et visée via une série de bouton (à l’ancienne ou la russe au choix),
- On attend 4-5 minutes que le système de guidage soit entièrement opérationnel,
- On active le gyroscope de ciblage de l’OBSERV (la partie extérieure de notre « périscope »), une fois le système ok les portes de protection de l’OBERV s’ouvrent,
- On sélectionne un missile (comme sur la gazelle),
- On cherche une cible puis on pointe le réticule dessus,
- Lorsque le tir est possible une petite lumière rouge apparaît ainsi qu’un son strident, on tire le missile et là, la partie la plus fun commence !
Garder le réticule sur la cible est compliqué, le système n’est pas stabilisé sur la cible comme le ferait une nacelle moderne de désignation, « en même temps, c’est juste une visée optique ». Il faut donc constamment anticiper les mouvements de l’hélico, par chance une aide sous forme d’une flèche indiquant le déplacement du viseur permet de mieux se repérer. Pratique ?
Oui, mais non, sauf lorsque qu’elle cache la cible et qu’il faut être précis. Par chance, elle est désactivable.
Une fois que le missile à impacté la cible (ou le sol plus souvent dans le cas de votre serviteur) il ne faut pas oublier de presser le bouton de réinitialisation de l’unité de guidage avant de sélectionner un autre missile. Sans quoi ce dernier ne sera pas guidé de façon optimum.
De plus fonctionnant sur un système gyroscopique assez ancien, il est impératif de mettre sur off l’OBERVS targeting gyros avant toute manœuvre « brusque » dépassant les 25° en tangage ou roulis.
-

- Le panneau droit est entierement dédié au système ATGM
-

- A gauche la partie gestion armement « standard » et à droite la partie ATGM + canon
-

- La partie gestion des missiles
-

- L’OBSERV fermé
-

- L’OBSERV ouvert
-

- Le système de visé
-

- Le système de guidage missile semblable à la gestion tourelle d’un char
-

- la partie électrique à la russe
-

- Facteur x3 du zoom
-

- Facteur x10 du zoom, noté la flèche qui cache la cible
-

- c’est mieux sans la flèche
-

- Meric Petro pour ce mouvement…
La place arrière
En place arrière la gamme d’armement utilisable est plus vaste mais aussi relativement plus simple à utiliser.
Le système de visé peut fonctionner en manuel ou en automatique.
En manuel, nous devons régler la distance à laquelle nous allons tirer nos munitions (pour faire simple) tandis qu’en automatique, c’est le calculateur de bord qui s’en occupe.
Attention, le mode automatique est très précis sur terrain plat ou peu vallonné, mais devient peu précis en terrain plus vallonné ou montagneux. Ceci dut au fait que le calculateur utilise le radar altimétrique.
Le canon de 30
Le canon fonctionne sur les modes manuel/auto, il peut tirer selon deux cadences et trois longueurs de rafales. Il est précis mais l’utilisation de la cadence haute avec une rafale longue ou moyenne fait dévier le HIND de sa trajectoire.
Les roquettes
Fonctionnent sur les modes manuel/auto (sauf les S-24B uniquement sur manuel). Elles peuvent être tirées selon trois longueurs de salves elles aussi. Elles peuvent être tirées soit sur tous les pylônes, soit le gauche ou soit le droit. Elles sont moins précises que le canon mais sont très utiles pour couvrir une zone.
Les bombes
Les bombes sont probablement l’armement le plus complexe à utiliser. Elles ne fonctionnent qu’en manuel et pour faire mouche l’utilisation d’abaques semble impérative. Elles ne sont pas aidées non plus par la modélisation des dégâts et des effets de souffle si « hasardeuse » de DCS…
Les pods
Quatre pods grenades peuvent être montés sur l’appareil. Ils ne fonctionnent qu’en manuel ce qui rend la précision dépendante de l’habileté du pilote à tenir ses paramètres. De plus étant explosives, les grenades sont limitées comme les bombes par la modélisation de l’effet de souffle….
Deux pods mitrailleuses peuvent être également montés sur l’appareil. Ils fonctionnent en manuel/auto, la précision est bonne et rajoute une bonne puissance de feu, on peut sélectionner soit les 12.7 soit les 7.62 ou alors les deux. Toutefois attention de ne pas abuser des rafales longues sous peine de voir les FPS dégringoler !
-

- Panneau de gestion d’armement
-

- Mode auto avec le canon sélectionné
-

- Mode manuel
-

- Cadence lente du canon
-

- Cadence haute et rafale moyenne du canon
-

- Tir roquette
-

- Tir avec les pods mitrailleuse
-

- Passe pour larguer des bombes

-

- Il faut une altitude minimal pour les bombes, surtout les grosses !
6. Le multijoueur
Lors de la rédaction de ce test seul un bug vraiment dérangeant est remonté (bug déjà rapporté à ED). Si l’opérateur prend place avant que le pilote n’ai fait le démarrage alors il ne verra pas le rotor tourner. Il n’y a pas non plus de soucis particuliers lors du transfert de commande entre les deux joueurs.
Le Hind est un appareil vraiment agréable à piloter en multi (humains) d’autant plus qu’actuellement, Petrovitch reste aveugle et muet. Alors une deuxième vraie paire d’yeux pour repérer les cibles et vous les indiquer, ce n’est pas du luxe !
Conclusion
Est-ce que cet appareil va vous plaire ?
Je ne suis pas spécialement un fan des machines russes et encore moins des anciennes. Mais je dois avouer prendre du plaisir à voler sur cet appareil, ne serait-ce par son coté mythique et son gros canon (NDLRC6 : on s’en serait douté)!
Bien qu’étant une early ce module donne satisfaction, il y a suffisamment d’armement et de systèmes pour se prendre au jeu que ce soit en multi ou en solo (à condition de rester pilote pour l’instant). Comme tout appareil de cette génération, il faudra pour le maîtriser bien connaître ses systèmes et surtout ses limites !
Pour les simer maîtrisant déjà le vol hélicoptère et surtout le MI-8 il n’y aura pas de difficultés particulières si ce n’est sa propension à très vite atteindre la vitesse de décrochage de pales.
Pour ceux souhaitant débuter le vol hélico sur cette machine, ils prennent le risque de se « dégoûter rapidement », les systèmes sont complexes, la machine est lourde et ne va pas apprécier les mouvements brusques que va lui imposer un débutant sur hélicoptère !
Mais si vous arrivez à dompter la bête alors vous allez vous régaler !
Concernant Petrovitch, c’est plutôt une bonne surprise. Du coté opérateur le principal reproche est qu’il est muet et aveugle (des boites de dialogues nous permette de savoir ce qu’il fait), la faute à l’early mais sur un appareil biplace c’est certainement l’un des points qui méritait d’être mieux travaillé !
Pour le coté pilote en revanche cela reste relativement moyen. Comme dit dans le test il est bête et méchant, il ne va pas chercher à éviter un obstacle, ses corrections sont brusques. C’est rageant, surtout lorsque l’on cherche à acquérir une cible et à garder le viseur dessus !
Il reste le plus utile pour une longue nav à haute altitude ou sur terrain plat.
Sur les à-côtés, le gros point noir, c’est le manuel ! 74 pages pour un module aussi complexe, désolé, mais ce n’est pas professionnel, comment utiliser le pilote auto ? Comment utiliser les radios ? La nav ? La gestion du carburant ?
Une partie de ces questions peut être résolue en allant voir le MI-8, mais si on ne possède pas ce module comment fait-on?!
Globalement ce module bien qu’encore en Early est une réussite et nul doute qu’il sera un « must have » à sa sortie définitive ! D’ailleurs, si vous voulez vous faire une idée n’oubliez pas que vous avez le droit à 14 jours d’essais ;).
Daniel Valero
10/08/2021 at 14:04Merci Ricaym, ce n’est pas un article mais un cours que tu nous as pondu!
Cette machine a quelque chose d’animal, j’aime beaucoup. Et la qualité d’immersion est là
Blackbird
13/08/2021 at 11:05Excellente description, merci.