
Des nouvelles du Corsair II pour DCS du coté de chez flyingiron simulations
retrouvez la version originale ICI
Auteur : Dan K
FlyingIron Simulations
Traduction via DeepL
Bonjour à tous les pilotes !
Tout d’abord, merci à tous d’avoir été si patients dans l’attente de ce rapport. Votre soutien et votre intérêt continus pour le projet nous donnent de plus en plus de motivation pour continuer à faire de l’A-7E le meilleur possible !
Aujourd’hui, je (Dan) parlerai du Corsair, de son évolution et de certains des systèmes sur lesquels nous avons travaillé. Le développement s’est accéléré à un rythme fantastique ces dernières semaines en particulier, avec des tâches et des jalons cochés presque quotidiennement sur notre liste. C’est une période très excitante pour le Corsair, il y a donc beaucoup à dire.
Avant de commencer, j’aimerais également préciser que nous cherchons constamment à élargir notre équipe PME et à faire venir plus d’experts, donc si vous ou quelqu’un que vous connaissez avez volé ou travaillé sur Corsair, veuillez nous contacter !
Maintenant, commençons par le modèle de vol !
Développement du modèle de vol
Le développement de notre EFM (External Flight Model) va bon train et se concentre actuellement sur la construction et l’expansion de notre itération pleine fidélité de l’EFM qui a été discutée dans notre dernier rapport de développement.
Pour récapituler, notre EFM est construit à partir d’une combinaison de données de soufflerie, de données générées par la CFD ainsi que de commentaires et d’informations provenant d’anciens pilotes d’A7. Jusqu’à présent, j’ai développé un modèle de vol de base dont nous sommes très satisfaits – notre objectif était de créer un EFM de base qui capture l’aérodynamique et les caractéristiques clés du Corsair avec seulement un minimum de données aérodynamiques, ce que j’ai maintenant réalisé. Cela fournit maintenant une « base » aérodynamique solide et précise sur laquelle je peux construire et développer, ce qui est exactement ce que j’ai fait au cours des derniers mois.
Nous avons utilisé l’excellent programme de CFD, FlightStream, avec l’aide de DARCorp pour nous aider à saisir les données de vol à utiliser dans l’EFM. Pour ceux qui ne le savent pas, le logiciel CFD simule essentiellement l’écoulement de l’air sur un modèle de CAO pour prédire et calculer les forces aérodynamiques dans n’importe quelle gamme de conditions de vol. Ci-dessous, un tracé rapide des données réelles de soufflerie (orange) par rapport aux prédictions de Flightstreams (bleu) pour les forces du moment de tangage. Notez que ce graphique a été capturé avec notre premier modèle CAD de test, qui était de basse fidélité et a été amélioré depuis ; même ainsi, les résultats sont excellents – remarquez que la précision continue bien au-delà de la région de décrochage et jusqu’à 90 degrés d’angle d’attaque !

Récemment, j’ai achevé et intégré les modèles aérodynamiques du train d’atterrissage et des volets de bord de fuite, et je travaille actuellement à l’intégration des volets de bord d’attaque et des spoilers intérieurs. La modélisation de la traînée a été considérablement améliorée, en mettant l’accent sur les corrections de Mach et les améliorations dans la gamme trans-sonique. La modélisation du moteur TF41 a également été développée, avec des calculs de poussée beaucoup plus précis et des retards de spooling implémentés.
Au cours des prochains mois, je m’efforcerai de développer la modélisation des surfaces de contrôle, les performances du bord de l’enveloppe et de travailler en étroite collaboration avec les PME pour perfectionner la modélisation du décrochage et de la vrille.
AN/ALR-67 RWR
Je suis très heureux de dire que la fonctionnalité de base du RWR a déjà été développée et mise en œuvre, ce qui signifie que la « partie la plus difficile » du développement est déjà faite ici. Avec cela en place, le développement se concentre maintenant sur le calcul des groupes de priorité et des anneaux de menace, l’implémentation des symboles de verrouillage/décollage et autres et enfin la mise à jour des sons.
Le développement se concentre sur la recréation du récepteur d’alerte radar AN/ALR-67, qui a été utilisé dans les dernières phases de la vie du Corsair avec l’écran ALR-45F. L’ALR-67 est également utilisé dans les F/A-18, F14B et beaucoup d’autres avions occidentaux et est donc très familier à beaucoup d’entre vous. L’un de nos experts, ancien technicien en avionique de l’A-7 pour LTV, a déclaré ce qui suit au sujet du système RWR :
« …Le grand avantage des nouveaux RWR et du HARM est la précision des fichiers de renseignement électronique (ELINT) et la recherche de direction sur 360 degrés, sans manœuvres ni alignement fastidieux comme c’était le cas avec le Shrike. En cas de forte concentration de radars ennemis, les nombreuses tonalités dans le casque étaient gênantes pour les pilotes, mais pour des raisons de survie, la plupart les ont tolérées et ont survécu pour combattre un autre jour. »

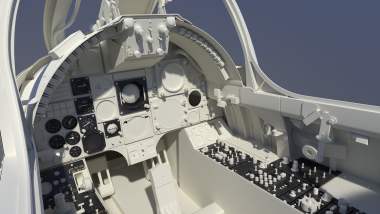
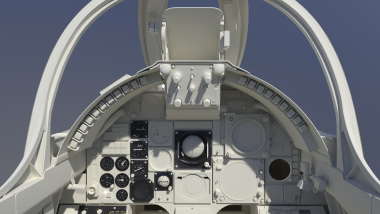
Affichage tête haute (Heads-up Display)
Nous disposons depuis un certain temps déjà d’un système HUD qui nous a bien servi. Au cours des prochaines semaines, je vais poursuivre le développement de la simulation complète du HUD. Nous développons le HUD AN/AVQ-7B(V), qui a été installé sur les A-7E après l’Airframe Change n° 390.
La variante AVQ-7B du HUD a la capacité supplémentaire de fonctionner en mode nuit en conjonction avec le système infrarouge de détection avancée (FLIR). En mode nuit, la symbologie du HUD est combinée avec le flux vidéo du FLIR pour créer un affichage composite sur le HUD qui offre une excellente vision nocturne.
Au cours des prochaines semaines, je vais terminer le développement des modes de navigation de base et des éléments d’affichage, puis je passerai aux choses amusantes : CCIP ET CCRP 😉
Voici un excellent aperçu et une démonstration du HUD en action sur un vrai A-7 Corsair !
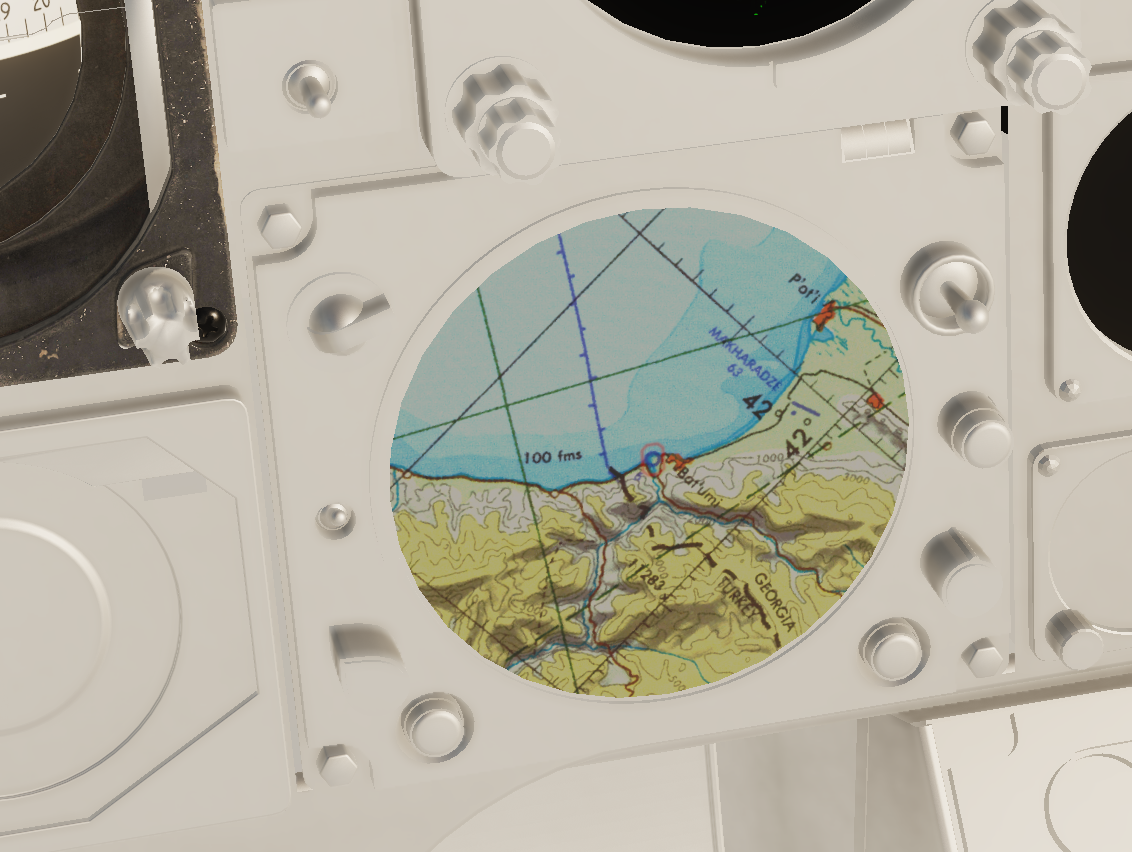
Système de visualisation de cartes projetées (PMDS)
Je suis heureux de dire que le développement du PMDS a largement dépassé la moitié du chemin, avec tous les modes et fonctionnalités de base maintenant modélisés avec précision. Le PMDS fonctionne en projetant des bandes de film sur l’écran, les bandes de film défilant et tournant pour refléter le cap et la position de l’avion. Les bandes de film étaient composées de photos de cartes aéronautiques à deux échelles : 1:500k et 1:2 million. Le PMDS dispose ainsi de deux échelles, correspondant à un rayon d’environ 10 nm sur l’écran et à un rayon de 50 nm sur l’écran. Le PMDS dispose également d’un mode « Données », dans lequel le film de réserve sur les bandes de film peut être utilisé pour stocker les données de vol et les procédures afin que le pilote puisse les consulter en cas de besoin.
Avec tous les modes et fonctionnalités de base du PMDS modélisés, je vais passer à des fonctionnalités plus avancées au cours des semaines et mois à venir, y compris : La fonction Slew du PMDS, l’opération Manuel/Hold, la sauvegarde des points de repère ainsi que la réalisation par Alex des éléments visuels et artistiques de l’écran (textures, verre, modèle etc.).

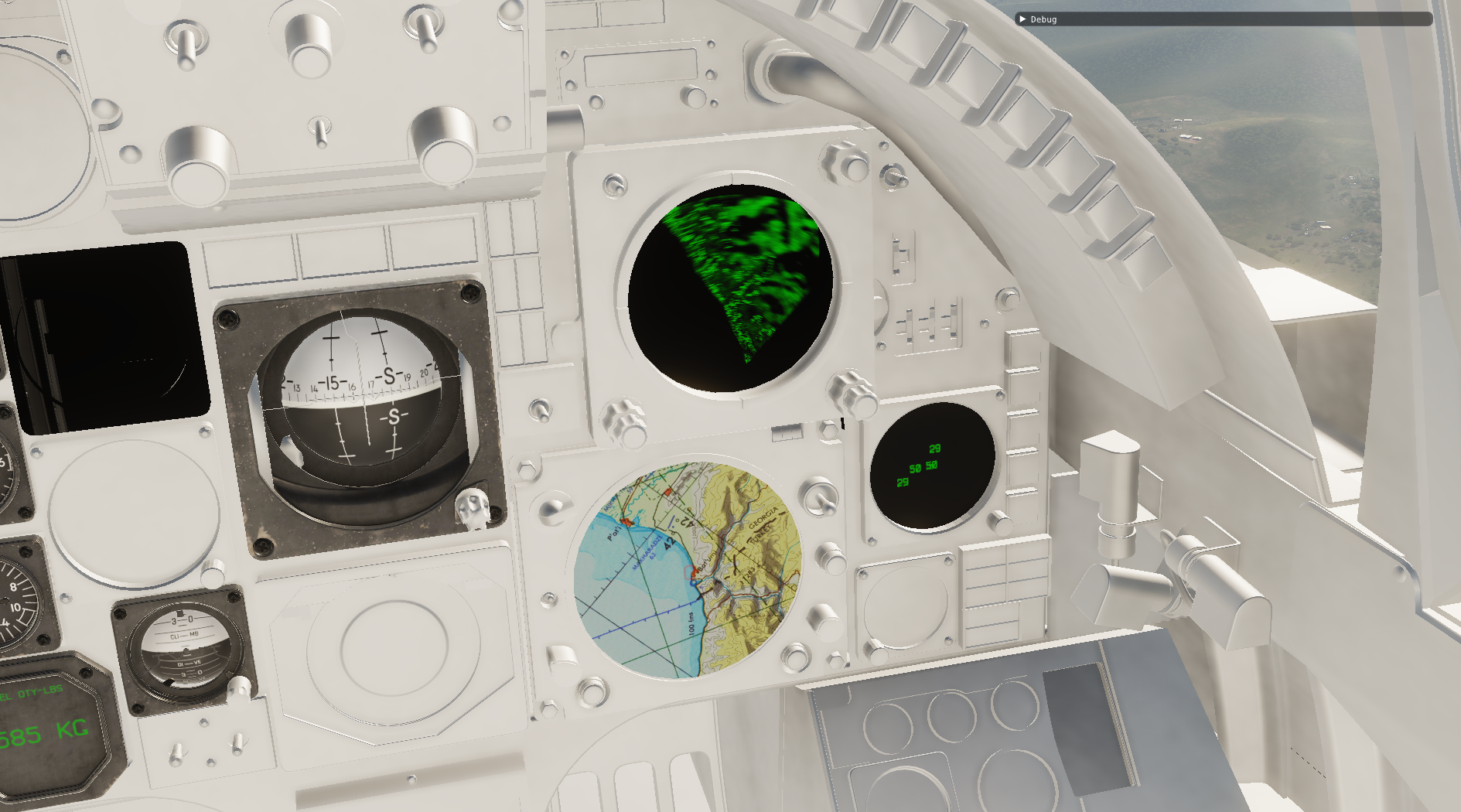
AN/APQ-126(V) Forward Looking Radar)
Le radar de vision frontale est conçu pour la cartographie du terrain, la télémétrie et la livraison d’armes A2G, le fonctionnement des balises et l’évitement du terrain. La gamme dynamique de l’écran permet de le réduire suffisamment pour les opérations de nuit. Il dispose de 11 modes de fonctionnement :
1. Balise
2. Évitement du terrain
3. Carte du terrain, crayon
4. Carte de terrain, gâchée
5. Ranging A2G
6. Ranging A2A
7. Suivi de terrain et évitement de terrain combinés (CSTA)
8. Combinaison de suivi de terrain et de cartographie du sol (CSGMP)
9. Suivi du terrain
10. Affichage amélioré de la pie-grièche (SIDS)
11. Affichage de la télévision
L’écran de télévision peut être utilisé pour guider les armes optiques, comme le doré jaune.
J’ai le plaisir de vous annoncer que le travail sur le système radar a commencé sérieusement ; vous pouvez voir ici quelques images très précises de nos tests de validation du concept. Nous utilisons l’API du radar terrestre développé par ED, qui jusqu’à présent a été excellent et fonctionne bien pour le Corsair. Jusqu’à présent, j’ai modélisé un mode de base de cartographie du sol et je travaille maintenant à développer des modes supplémentaires, ainsi que la logique de visée et de livraison des armes.
NB : Encore une fois, ces images sont un test de preuve de concept et il manque tous les éléments artistiques et la configuration.
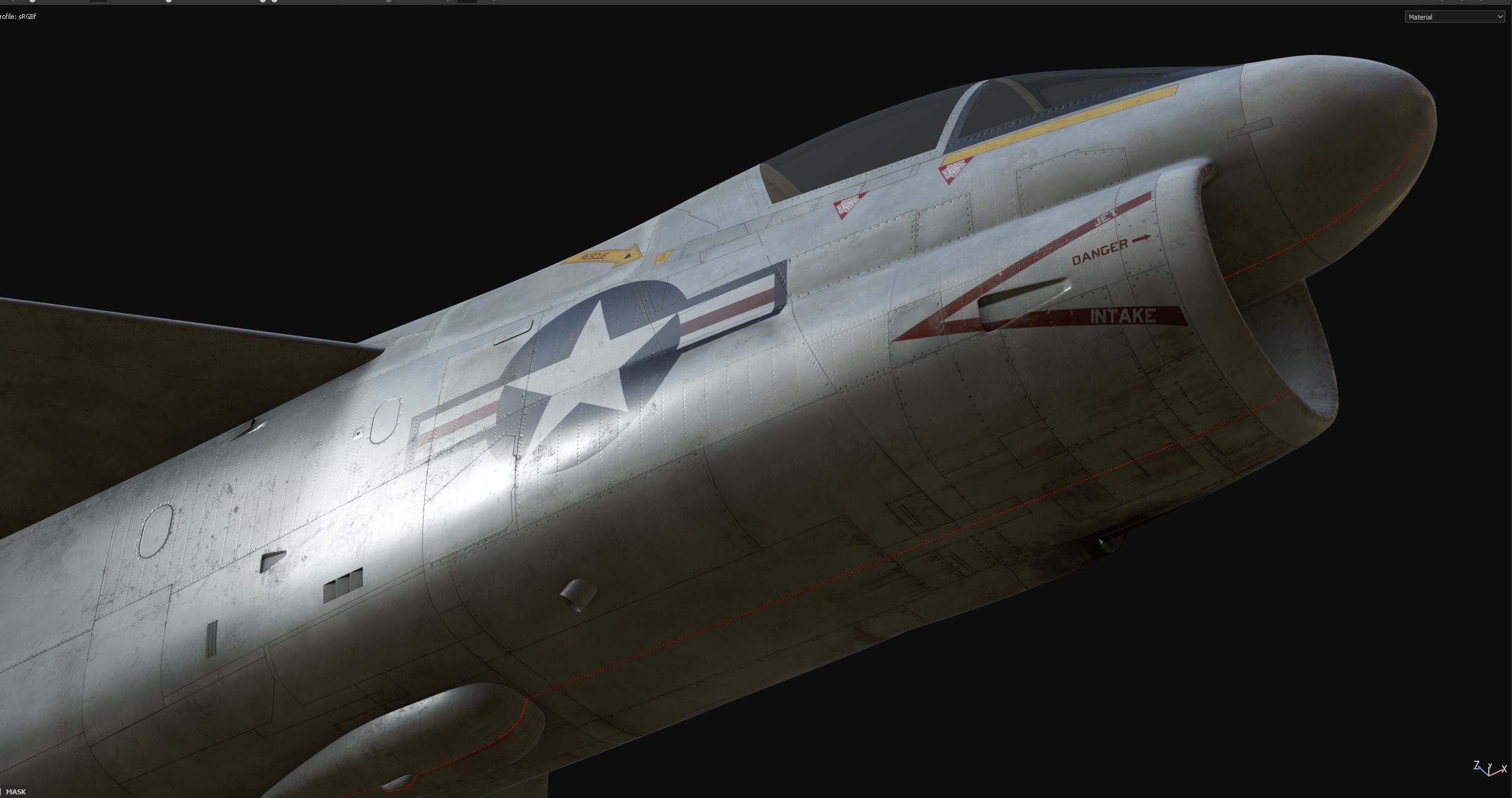
Artwork
Vous remarquerez que ce rapport de développement est un peu pauvre en images – c’est parce que malheureusement nous n’avons pas encore beaucoup de nouveautés à montrer en termes d’art ! Alex, notre artiste, s’est largement concentré sur le travail de MSFS au cours des derniers mois, car il n’a pas été sollicité de manière urgente sur l’A7 – j’avais encore beaucoup de travail de programmation à faire pour rattraper mon retard.
Récemment, cependant, nous avons élargi notre équipe avec deux artistes supplémentaires qui font un travail extraordinaire pour nous. Maintenant que ce travail est terminé, l’un de nos nouveaux artistes a été chargé de réviser, mettre à jour et compléter notre modèle 3D, à l’intérieur comme à l’extérieur. Nos artistes ont prouvé au cours des dernières semaines qu’ils pouvaient créer des modèles de très haute qualité incroyablement rapidement, nous sommes donc très impatients de voir ce qu’ils peuvent faire avec l’A7 au cours des deux prochains mois !
Nous partagerons quelques images de leur travail avec notre prochaine annonce de module MSFS dans les prochaines semaines 🙂
Roadmap
Auparavant, nous avions présenté notre feuille de route de développement comme étant composée de 4 phases de développement, la sortie du produit étant prévue après l’achèvement de la phase 4. Nous sommes extrêmement heureux d’annoncer que depuis notre dernier rapport de développement, la phase 2 du développement est entièrement terminée et la phase 3 bat son plein depuis quelques mois maintenant. La vitesse de développement a augmenté de manière significative, grâce à Raimond (aka GotGravel) qui a rejoint l’équipe pour aider notre branche MSFS, ce qui m’a permis de travailler sur le Corsair 7 jours sur 7.
Nos principaux objectifs pour la phase 2, qui sont maintenant terminés, comprenaient :
– EFM fonctionnel et pilotable, basse et moyenne fidélité.
– Intégration des principales jauges analogiques pour les tests
– Systèmes principaux modélisés et intégrés (électrique, carburant, hydraulique, etc.)
– HUD fonctionnel de base : Mode Nav
– Pylônes et configurations de chargements
– SFM AI intégré
– Interrupteurs clés cliquables intégrés
Avec tout cela fait, la phase 3 est maintenant en cours, avec de nombreux jalons déjà très bien suivi et les progrès se produisent rapidement. La phase 3 a beaucoup d’objectifs et de jalons, mais pour résumer, il s’agit de développer des simulations de haute fidélité de tous les systèmes avioniques, d’armes et de vol clés du Corsair – l’idée est que le Corsair soit prêt pour les tests de vol des PME lorsque la phase 4 commencera.
L’idée est que le Corsair soit prêt pour les essais en vol des PME dès le début de la phase 4. La phase 4 du développement sera centrée sur les essais et le retour d’information des PME ; le perfectionnement de l’EFM, de l’avionique et le remplissage des détails manquants.

Merci encore une fois pour votre patience et si vous êtes arrivés jusqu’à la fin, merci de nous lire ! Nous espérons que vous êtes aussi excités par le Corsair II que nous le sommes !
Soyez prudents,
Auteur : Dan K
FlyingIron Simulations
Kima
27/10/2021 at 22:15Voilà de quoi remplir les hangars! Vivement la suite